液体机器人,是许多经典的科幻电影给出的答案。
电影《终结者》中,液态金属机器人T-1000,可以任意分解、重组、变形,模仿接触过的物体。电影《毒液》中的外星生命体,如同有智慧的液体机器人,与人类“共生”。
这些奇思妙想可以变成现实吗?在今年的中关村论坛上,一款形似单细胞生物——阿米巴虫,时而蜷缩、时而伸展,可以自如变形运动的液体机器人,吸引了众多观众的目光。
这款充满“未来感”的机器人,是北京交通大学机电学院90后教师李振坤多年心血的结晶。为此,他开发智能材料、研制4D打印机,还组建了一支由青年硕士、博士组成的多学科交叉科研团队。
数年耕耘不辍,产品几经迭代。
一款名为“流变机器人”的前沿科技成果,今年获得了全国发明展览会金奖和北京发明创新大赛金奖。

李振坤在全国科技活动周科技创新成果展上展示自主研发的4D打印软体机器人
机器人,少年梦
与机器人“缘”起何处?1991年出生的李振坤,看着经典的机器人动画片长大,在心里种下了“机器人梦”。李振坤的父母,分别从事机械专业和计算机专业教学工作。在父母的熏陶和指导下,他从中学起,就在机器人领域开始了探索。
2008年5月12日,四川汶川发生里氏8级特大地震,举国同悲。电视新闻里,在地形复杂、伤亡情况未知的救援现场,救援探测器的工作范围有限,救援人员面对坍塌严重的废墟又进不去。“干着急”的焦灼情景,让正在上高二的李振坤跟着揪心。怎么能解决救援探测的困境呢?他将目光锁定在自己最痴迷的机器人上。
李振坤遍查资料,发现在地震高发的日本,当时已经有了地震救援机器人。只是,这些初代仿生地震救援机器人还不成熟。比如,一种“爬虫形”机器人,容易卡缝儿、侧翻,而且翻倒后很难自己再爬起来。又如,一种“蛇形”机器人,模仿的是蛇蜿蜒摆尾的前进模式,但在逼仄的救援场景中,这条“蛇”摆尾的空间极为有限。
怎么才能使救援机器人小到可“钻缝儿”、稳到不“卡壳儿”呢?李振坤在毛毛虫和蚯蚓身上找到了灵感,利用弹簧连接不同模块,制作了可带着摄像头伸缩前进的“蠕虫形”救援机器人,成功破题。通过电磁铁压缩弹簧,就能实现前进、转向、抬头、低头。
这个简便易行又充满巧思的小机械装置,获得了当年的国家发明专利。对于一名高中生来说,这无疑是莫大的鼓舞。从那时起,李振坤就坚定了自己投身机器人科学研究领域的人生理想。
高考时,他报考了北京科技大学的机械工程学院,此后又在北京交通大学、清华大学一路读到博士后,其间,始终没有停下对机器人的探索。“完全解耦串并混联机器人”就是他求学期间机器人发明中的得意之作。
“工业领域使用的机械臂,通常分为串联机器人和并联机器人两种。这两种机器人,在实际应用中,各有优势和掣肘。”李振坤介绍,串联机器人就像是我们的手臂,是由多个“关节”连接,形成一个机械臂的链式结构,优点是精度高、载量大,缺陷是速度慢、结构僵硬、不适合复杂环境。并联机器人像是两条“交抱”的手臂,由至少两个独立的运动链相连构成,优点是速度快、灵活性强,缺陷是载量低、路径规划和控制复杂。
能不能把两种机器人结合起来,取其长而避其短呢?科研绘图中常用的工具——放大尺,给了李振坤启示。这是一种由4根直尺构成的工具,利用了平行四边形原理。别看它结构简单,却能在绘图中实现准确移动支点、调整灵活等功能。
李振坤创造性地将放大尺从平面结构变成三维结构,并利用这个装置研发出了三自由度平动线性完全解耦串并混联机器人。这种机器人的控制系统无需做繁杂的正逆解运算。同时,立方体的工作空间使其作业轨迹规划变得十分容易,在各个方向上负载能力也更均匀,不受位姿影响。
这个代表作,不仅取得了两项相关发明专利授权,还广泛地应用在了高速度、高刚度、大负载的工业场景。李振坤介绍,基于该机器人开发的煤矸石分选系统目前已经应用于开滦集团等大中型煤矿。“不仅填补了国内该类自动化装备的空白,还产生了显著的社会效益和经济效益。”他解释:平均每个系统可替代8名工人的工作量,每年节约成本48万元。机械作业,还降低了人工捡煤、煤矿安全生产的风险。
从高中阶段到现在的16年间,李振坤带着始终如一的热忱,在机器人研发的道路上步履不停。其间,他发表了50多篇高水平学术论文,授权国家发明专利10余项。
孜孜以求,对应着善作善成。这令刚刚崭露头角的青年科研工作者备受鼓舞。
远在天边 近在眼前
在工业机器人研发领域有所斩获的李振坤,有了更加深邃的思考。
“机器人领域正处于转型的关键时期,目前机器人的主要功能是‘替代人工’,而下一个阶段的目标则是‘人机共融’。”李振坤解释,当前,大多数基于机电系统的传统机器人由金属、导线以及其他硬质材料所构成。使用这些材料和结构的机器人可能缺乏“人机共融”时代必需的安全性、灵活性,以及在人机交互应用中的适应性。
“工业机器人在作业过程中,往往会采取‘人机隔离’的方式。”李振坤举例:比如,“黑灯工厂”以智能机器人或自动化设备完成全流程操作,不仅仅是为了节约相关生产环节的人工成本,也是为了保证操作人员的生命安全。
同时,目前大多数机器人,都是由机电系统组成,主要驱动力是由电能转换而来,这大幅降低了系统的能量利用率。他介绍,“传统的机电系统在能量转换过程中会产生大量的热损失,因此有效机械能仅占所消耗全部能量的30%以下。”
李振坤认为,现阶段的工业机器人并不能称之为“完全智能”的机器人。许多亟待智能化的领域,都是目前的机器人无能为力的。
2019年,他参加了一次银发经济论坛。在会上,李振坤了解到,根据预测,到2050年,我国进入重度老龄化社会后,一个年轻人就要赡养一个老人。对于一个失能、半失能老人来说,往往需要一个以上的人力才能较好地解决照护需求。
他切实地体会到数据背后迫在眉睫的巨大需求。机器人照护代替人工照护,不失为最解渴的破解之道。但金属的骨骼、机械的手,真的能让人放心地将垂暮的老人托付给它吗?
李振坤的困惑,也是横亘在“以智能化手段解决养老照护燃眉之急”这条路上的一道鸿沟。
如何让机器人给予柔软的陪伴?答案指向没有金属骨骼、与人类交互更安全的软体机器人。
近年,新型柔软机器人的概念已然提出,国外有高校也制作出第一个纯软体机器人。然而,彼时的软体机器人大多依赖于弹性材料的变形,方式相对固定,难以适应复杂多变的环境。
刚刚获得博士学位的李振坤敏锐地意识到,要实现真正的突破,必须寻找一种全新的材料和技术,让没有机电系统的软体机器人的动作具备“记忆性”。
什么才是软体机器人最理想的材料?
远在天边,近在眼前。
李振坤在硕士、博士就读期间,师从我国著名磁性液体专家李德才。他将远眺的目光,重新聚焦在了眼前手头的科研内容——磁性液体上。
磁性液体,也称磁流体,主要由纳米磁性颗粒、表面活性剂与基载液构成。由于既具有液体的流动性,又具有固体的磁性,使其在核能、化学、冶金、航天等领域都有重要应用。
“具有铁磁性的磁控流变记忆材料”是诺贝尔物理学奖得主德热纳曾预言过的未来仿生材料。如何让磁性液体具有“记忆性”曾是领域内的世纪难题。
李振坤拿出一块磁铁和一个装有磁性液体的容器,演示起了这个世纪难题产生的机制。当磁铁靠近黑色磁性液体时,磁性液体会随之移动、发生形变。但当磁铁挪开的瞬间,磁性液体就恢复到了初始的状态。“磁场撤离后,磁性液体中的纳米颗粒在布朗运动的驱使下,无规则地四散开来,回到原貌。这也是磁性液体不具备‘记忆性’的原因。”李振坤解释。
怎么破解这个世纪难题呢?“我的灵感来源于小时候常玩的积木游戏。”李振坤说,要让磁性材料具有“记忆性”,需要让其内部的纳米颗粒在磁场下自动组装成需要的结构,并保持固定。为此,必须给磁性液体的配方“加料”。李振坤带领团队进行了上百次的试验,最终筛选出了具有“记忆性”的材料。
世纪难题破解,曾经只存在于未来想象中的“磁控流变记忆材料”终于诞生了,这给了李振坤莫大的鼓舞。
但要把材料变成真正的机器人产品,还有一段探索的路要走。
在一次国际学术会议上,李振坤了解到4D打印技术。4D打印技术与3D打印技术相比,能够让3D技术打印出来的结构在外界刺激下发生形状或结构的改变。4D打印直接将材料与结构的变形设计,内置到物料当中,制造形态和性能随时可变的三维物体,实现了产品设计、制造和装配的一体化融合。
他坚信,4D技术能够帮助自己设计的软体机器人完成从理念到实物的无缝对接。为此,他又利用智能材料的响应特性,结合编程化设计,研制出了具有磁畴写入功能的4D打印机。
“这就是一个小小的智能软体机器人。”李振坤拿起遥控器,指挥着一个看上去形似橡胶片的“小人儿”,前进、后退、翻转。“直白地说,就是通过4D打印把智能材料对磁场等外界刺激的响应,通过编程,直接‘写’进打印出来的物体里。”
眼前舞动的“小人儿”,只是智能软体机器人巨大应用前景的一个小小缩影。
李振坤说,未来,智能软体机器人或将在航空航天、生物医药、康复医疗等诸多领域大展拳脚。
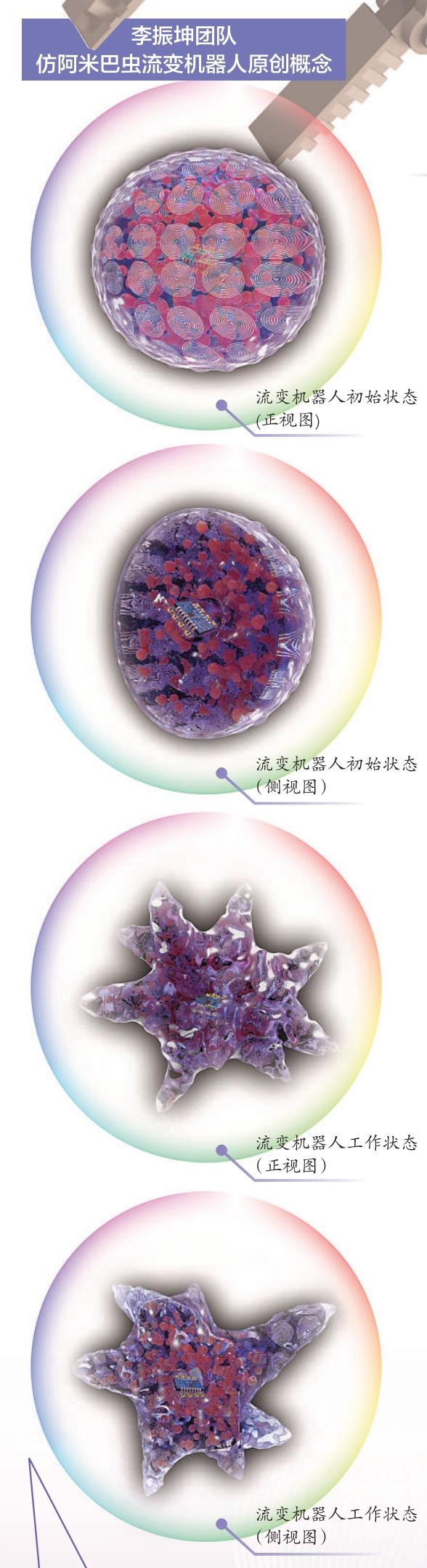
机器人外膜由磁性水凝胶制作,打印有液态金属组成的分布式柔性线圈,可控制机器人不同部位材料发生凝胶-溶胶转化,并利用磁场梯度驱动机器人体内材料沿一定方向流动,使机器人产生类似阿米巴虫的运动。
机器人内部集成许多柔性薄膜传感单元,每个单元内集成半导体磁电器件与力学传感单元,使机器人可以实时感知自身内部类原生质分布与流动情况。
人机共融 奋楫向前
李振坤创立的Rheobot实验室(流变机器人实验室)里,3D打印机、4D打印机、多材料复合打印机等各种设备繁忙作业,操作台上摆放着各式各样新奇的产品样本……
“这就是软体机器人的迭代产品——流变机器人。”李振坤说的机器人,其实是悬浮在溶液中的一团黑色物质。在外界磁场的驱动下,黑色物质就像被赋予了生命一样,时而如同“贪吃蛇”一般在画好的格子上按既定路线行走,时而又像电影《毒液》中的外星生命体一般展现出特定的形状。
“像‘毒液’吗?其实更像一种简单生物——阿米巴虫。”李振坤笑着说。
他介绍,近年来,基于磁控智能材料的微型液滴机器人成为科研的热点。但这类机器人的应用始终存在掣肘——其形态依靠表面张力维持,无法实现灵活可控的固液转化,科研的步伐囿于实验室之中。
而李振坤团队在此前研发“磁控流变记忆材料”的基础上,提出了“类生命流变机器人”的概念。“这款机器人的仿生对象就是单细胞真核生物——阿米巴虫。”
越简单的生物,运动机制越容易实现。阿米巴虫的运动基于其细胞膜内原生质的凝胶-溶胶转化。原生质根据其分布位置可分为外质与内质,凝胶状外质主要分布在虫身外部;溶胶状内质分布在虫体内部。溶胶状原生质在外质包围的管状空间中向前流动,外质管充当外表面的皮肤。当内质到达前端时,会通过触变老化机理转换成凝胶状外质,从而在透明冠区域形成伪足前端。伪足前端接着外质管延伸,使机体向前运动。
模仿阿米巴虫的运动机制,李振坤团队通过一体化复合4D打印技术制作了流变机器人的本体,并用众多电磁铁线圈制作了该机器人的驱动模块。驱动模块在控制器的作用下,产生不同方向的恒定或交变磁场,控制机器人本体不同部位材料发生凝胶-溶胶转化,并利用磁场梯度驱动机器人体内材料沿一定方向流动,最终使机器人产生类似阿米巴虫的运动。
未来在流变机器人的内部,还可以集成许多柔性薄膜组成的传感单元,使其具备自我感知、能量传递、信息传递等特性,有希望构建由该材料组成的智能体系,并实现类似生命系统的功能。
李振坤说,这种可以实现固液转化(溶胶-凝胶转化)的新发明,将大幅提高软体机器人的灵活性。以柔克刚的体质,使它在军事探测、星际探索、智能穿戴等领域具有广阔的应用前景。
目前,李振坤的团队已与北京大学人民医院骨肿瘤科王军医生团队合作,开展利用流变机器人抑制癌细胞转移的相关科研实验。“机器人携带的抗体,可以识别血液内的癌细胞。利用机器人固液转化的效应,抓取并包裹住转移的癌细胞。通过交变磁场产生的热量,将热敏感度很高的癌细胞加热、杀死。”
现在,该项目已进行到了动物实验的阶段,第一期动物实验已经完成。“一期实验杀死了小鼠体内75%的癌细胞,且实验用小鼠存活状态良好。”李振坤对流变机器人在项目中的表现感到满意。
从动物实验到临床应用,还有十分漫长的路要走。不过,一想到自己带队研制的机器人可能为人类攻克抗癌难题做出贡献,李振坤就感到非常振奋。
星光不负赶路人,江河眷顾奋楫者。在探索“人机共融”的这条路上,李振坤带领团队一路奔跑,不曾懈怠。
 怀念旧版
怀念旧版