
“科学和艺术是不可分割的,就像一枚硬币的两面。”诺贝尔物理学奖得主李政道曾这样说。
科学求变、艺术求美。北京交通大学机器人研究中心执行副主任姚燕安把他研制的几何机器人,带进了北京有名的798艺术区。一场“恒易——几何机器人艺术科技展”在科学界和艺术界引起不小反响。
这是怎样了不起的机器人?又怎会成为艺术品?它们由各种几何形体构成,可变形、易折叠、能缩放,可滚动、能爬行、擅滑行,独特的机械结构像是“冷艺术”,诠释出极简主义风格。
姚燕安以独创的几何机器人,在世界机器人江湖自成一派。
几何世界里的“变形金刚”
在《三国演义》里诸葛亮发明了木牛流马,“特行者数十里,群行三十里”,为蜀汉十万大军提供粮食。如今,传统意义上的“长脚”两足、多足机器人,搭载有计算机和移动设备的“轮式机器人”和“履带式机器人”,其形象已深入人心。
为了打破常规,姚燕安决定独辟蹊径,在世界机器人江湖独创一派。他提出的几何机器人,是“几何学+机构学”的融合之作。
从本科、博士到博士后,姚燕安在机械工程领域打下深厚的功底。早在十几年前,他就提出“多模式整体闭链连杆式移动系统”的新概念,其本质是将复杂空间连杆机构整体用于构成移动机器人的机械本体,使之具有复杂环境的高度适应能力、良好刚度和低成本控制系统等显著技术优势。
姚燕安最初设计的一个低成本三连杆机器人,就是这一概念的产物。
“从三连杆、四连杆到八连杆,正如中国传统哲学中道生一,一生二,二生三,三生万物的规律,如果按照一套创新设计的方法论,更多更复杂的机器人就可以绵延不绝地开发出来。”中国传统的哲学思维,启发姚燕安创新性地提出几何机器人的概念。
几何机器人在外形上可呈现三角形、四边形、四面体、立方体等典型几何形体特征,以电动机驱动控制后,具有可变外形能力以及折叠、缩放功能,能实现自主滚动、步行、爬行、滑行等多种移动方式,堪称几何世界里的“变形金刚”。
这种机器人不仅具有特立独行的构造,更具备能量强大的“内功”。不信你看:
一个滚动三角形机器人,通过电动推杆控制重心变化,重复倾倒过程可直线移动,如果在底部加装两只脚,还能步行;
一个六边形机器人,借助顶点的转动铰链,拥有变形能力,它可变成三角形、四边形、五边形,甚至能模仿履带方式完成滚动;
一个多模式可重构连杆式移动机器人,在平坦路面上以轮子形态快速滚动,来到松软路面就变形为履带滚动,进入低矮洞穴则似蛇形爬行,而遭遇台阶、壕沟或碎石时又可实现“手脚”攀爬。更令人惊奇的是它还能折叠起来,遇有救援任务便于运输、储藏,甚至投射……
给机器人超强越障能力
说起几何机器人的强项,姚燕安颇为自豪。他解释,传统的履带式机器人较为沉重,不够灵活,腿式机器人在复杂路面上不好控制,“我们的几何机器人具有更强的变形能力,遇到不同的地势无需重新拼装,能够快速反应,适应不同的地形地貌。”
姚燕安说,几何机器人因其强大变形功能而具备的极强越障能力,在极端障碍环境中可大显身手,其适用场景包括民用领域抢险救援中严重破坏路面、军事领域的野外作战动态变化地形等,未来它也有希望取代轮式、履带式、腿式等地面移动机器人,在民生、国防安全、国际反恐、航天技术等领域开展相关作业。
在科研生涯中,姚燕安并没有碰上特别大的挫折,但“一项长久持续的研究,路途中一个接一个的小困难是不可避免的。”他回忆道,“我研究新机器人的第一篇论文的诞生,前后花了四五年时间,而这才只是探索迈出的第一步。”他早已做好打持久战的准备,开辟新领域,让新领域被认可、被接受是一件艰苦而漫长的事。此后,姚燕安团队又陆续发表了近百篇论文。
“我的对手是美国航空航天局。”姚燕安常这样开玩笑说。在月球等星球进行表面探测,由于地形环境未知或难以精确预知,风险极高,而几何机器人超强的地形适应能力可在这种艰苦环境中大展身手。
学术突围和得意之作
近二十年来,姚燕安已研制出百余种几何机器人,要说最得意之作非“雪花”机器人莫属。
在北交大堆满机器人的“机构创新与机器人学设计”实验室里,姚燕安展示了“雪花”真身。这是一款有着雪花形状的连杆机构机器人,其基本构型为六角形,通过改变边角数量亦可创造出八角、十角、十二角等多角雪花形态。它不仅灵活多变,还相当智能,不需应用传感器探测即可自适应地形障碍,即便未加装电机也能沿缓坡自动行走,步态优雅灵动。更妙的是,若用四个“雪花”替代传统轮式机器人的车轮,能获得变形轮机器人,它既能以圆形轮在平地上快速移动,又能变成大轮径越障攀爬。
“一片‘行走的雪花’,非常浪漫,不是吗?”犹如欣赏艺术品一般,姚燕安打量着自己的代表作。
的确,“雪花”既是这位理工男的学术突围,也是作为文艺男的审美追求。而此番求新求变,源于十多年前的科研瓶颈。姚燕安叹道:“几何机器人做久了之后,会发现越做功能越多,能力也越来越强大。但一直沿着这条路去探索,也会有类似黑夜行路的感觉,很孤独。”
2008年到2009年在德国访问的一年间,姚燕安经常走访当地的美术展、艺术馆等。说来,姚燕安有点“小文艺”,他喜欢欣赏文艺作品,也习惯以音乐解乏,欧几里德的《几何原本》和牛顿的《自然哲学的数学原理》也常读常新。凭借科学家的直觉,他设想,“科学与艺术融合的探索,或许是摆脱孤独的路径。”
“科学和艺术是不可分割的,就像一枚硬币的两面。”姚燕安说李政道的这句话后面其实还有一句,“它们共同的基础是人类的创造力,它们追求的目标都是真理的普遍性。”
主动与艺术家们沟通交流,观察分析舞蹈的形式,将静态的画作、雕塑通过几何机器人展现……多番尝试之后,有艺术范儿的机器人一个接一个问世,竟收获不少艺术家的认可。
今年3月,北京的798艺术区内一场名为“恒易——几何机器人艺术科技展”的展览盛大开幕,展览主角就是姚燕安的几何机器人们。
科学求真、艺术求美,科艺互融,亦真亦美。
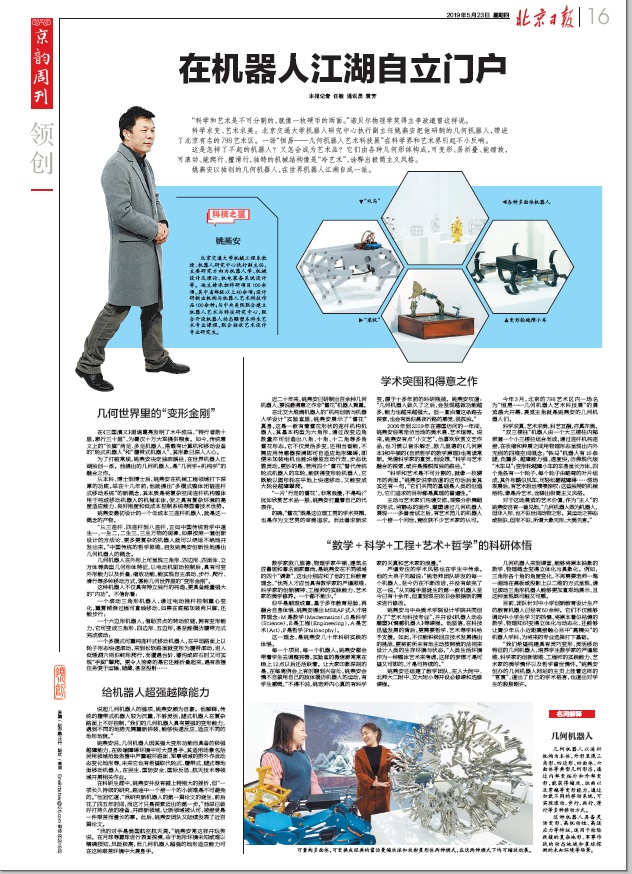
“双三棱柱”机器人由一个大三棱柱内部嵌套一个小三棱柱组合而成,通过连杆机构连接,在收缩和伸展之间用物理形态呈现出内外无别的四维空间概念;“铁马”机器人有16条腿,负重多、越障能力强、速度快,仿佛现代版“木车马”;变形轮越障小车的车身呈长方体,四个角各有一个轮子,每个轮子由略弯的叶片组成,其外形酷似风车,可轻松翻越障碍……现场观展后,有艺术粉丝啧啧惊叹:这些独特的机械结构,像是冷艺术,诠释出极简主义风格。
对于这场展览的艺术价值,作为“主人”的姚燕安自有一番见地,“几何机器人既为机器人,但非人形,也不似世间动物之形。其运动之神态或相似,但形不似,所谓大象无形,大美无言。”
“数学+科学+工程+艺术+哲学”的科研体悟
数学家欧几里德、物理学家牛顿、建筑名匠鲁班和著名画家塞尚,是姚燕安在不同领域的四个“偶像”,这也分别应和了他的工科教育理念,“优秀人才应当具有数学家的严谨思维、科学家的创新精神、工程师的实践能力、艺术家的美学修养。一个都不能少。”
似乎是顺理成章,基于多年教育经验,再融合自身体悟,姚燕安提出MSEAP式人才培养理念:M是数学(Mathematics),S是科学(Science),E是工程(Engineering),A是艺术(Art),P是哲学(Philosophy)。
这一理念,是姚燕安几十年科研实践的体悟。
每一个项目,每一个机器人,姚燕安都会带着学生去调整完善,实验室的微信群常常在晚上12点以后还活跃着。让大家印象深刻的是,在每周例会上有时聊到兴奋处,姚燕安会情不自禁用自己的肢体模仿机器人的运动,有学生感慨,“不得不说,姚老师内心真的有科学家的天真和艺术家的浪漫。”
严谨专注的学术风格也在学生中传承。他的大弟子刘超说:“姚老师团队研发的每一个机器人,至今仍在不断改进,并没有做完了这一说。”从刘超手里诞生的第一款机器人至今已有十余年,但直到现在依旧会根据新的需求进行修改。
姚燕安与中央美术学院设计学院共同创办了“艺术与科技专业”,并开设《机器人动态雕塑》《情感机器人》等课程。他坚信,在科技迅猛发展的背后,更需要哲学、艺术等学科给予支援。如此,不仅能积极回应技术发展提出的挑战,更将前所未有地主动按照美的法则来设计人类的生存环境与状态,“人类生活环境作为一种整体艺术来考虑,这样的梦想才是可望又可即的,才是可持续的。”
姚燕安还组建了教学团队,在人大附中、北师大二附中、交大附小等开设必修课和选修课程。
几何机器人来到课堂,能够将原本抽象的数学、物理概念变得立体化与具象化。例如,三角形各个角的角度变化,不再需要老师一笔一画地在黑板或投影上以二维的方式呈现,通过滚动三角形机器人能够更加直观地展示,且这种呈现既可触又可感。
目前,团队针对中小学创新教育设计生产的教育机器人已经有50余种。它们不仅能够调动中小学生学习的热情,将原本看似枯燥的数学、物理知识变得立体化与动态化,还能够让青少年从小近距离接触心目中“高精尖”的机器人学科,为将来的专业选择打下基础。
“我们希望构建具有灵巧变形、灵活移动特征的几何机器人,培养学生数学家的严谨思维、科学家的创新思维、工程师的实践能力、艺术家的美学情怀以及哲学普世情怀。”姚燕安创办的几何机器人网站的主页上挂着这样的“官宣”,道出了自己的学术格言,也道出对学生的殷殷期许。
名词解释
几何机器人
几何机器人以连杆机构为本体,外形呈现三角形、四边形、四面体、六面体等典型几何形态,通过内部变拓扑和外部变形,能获得缩放、扭曲以及穿越等变形能力,通过加载不同的移动系统,可实现滚动、步行、爬行、滑行等多种移动方式。
这种机器人具备灵活变形、高机动性、高适应力等特征,适用于抢险救援的复杂地形、军事作战的动态地域和星球探测的未知环境等场景。

科技之星
姚燕安北京交通大学机械工程系教授、机器人研究中心执行副主任,主要研究方向为机器人学、机械设计及理论、机电装备系统设计等。他主持承担科研项目100余项,其中省部级以上40余项;设计研制出机构与机器人艺术科技作品100余种;与中央美院联合建立机器人艺术与科技研究中心,联合开设机器人动态雕塑本科生艺术专业课程,联合招收艺术设计专业研究生。
 怀念旧版
怀念旧版